Install nanosaur desktop simulation
Do you want to try nanosaur on a simulator? You can start directly from this tutorial.
Before to follow this tutorial, install nanosaur desktop software!
Install simulation packages
nanosaur install simulation
This script enable and install all simulation packages to drive such a real nanosaur robot, but on Gazebo.
The script install in your desktop:
- Simulation packages nanosaur simulation
- Docker compose to run Isaac ROS perception docker
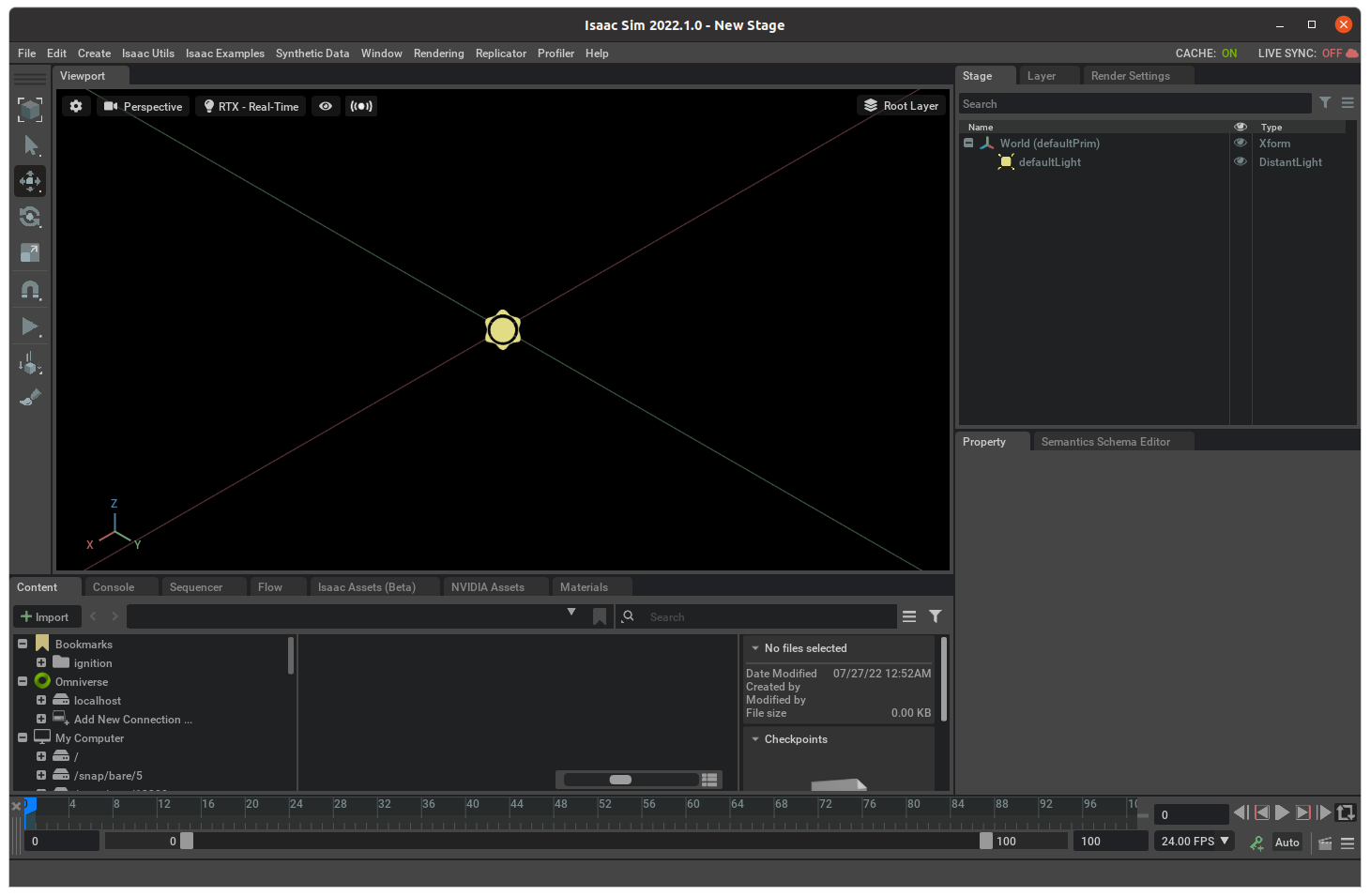
Install NVIDIA Isaac SIM
Do you want to jump on NVIDIA Isaac SIM? nanosaur is made for it!
There are two steps to do to have your robot on NVIDIA Isaac SIM:
When is done, you can use Isaac SIM with your robot
Setup NVIDIA Omniverse nucleus
When nucleus is first installed, it will prompt you to create a user. Remember your username this is necessary for the gz-omni connector.
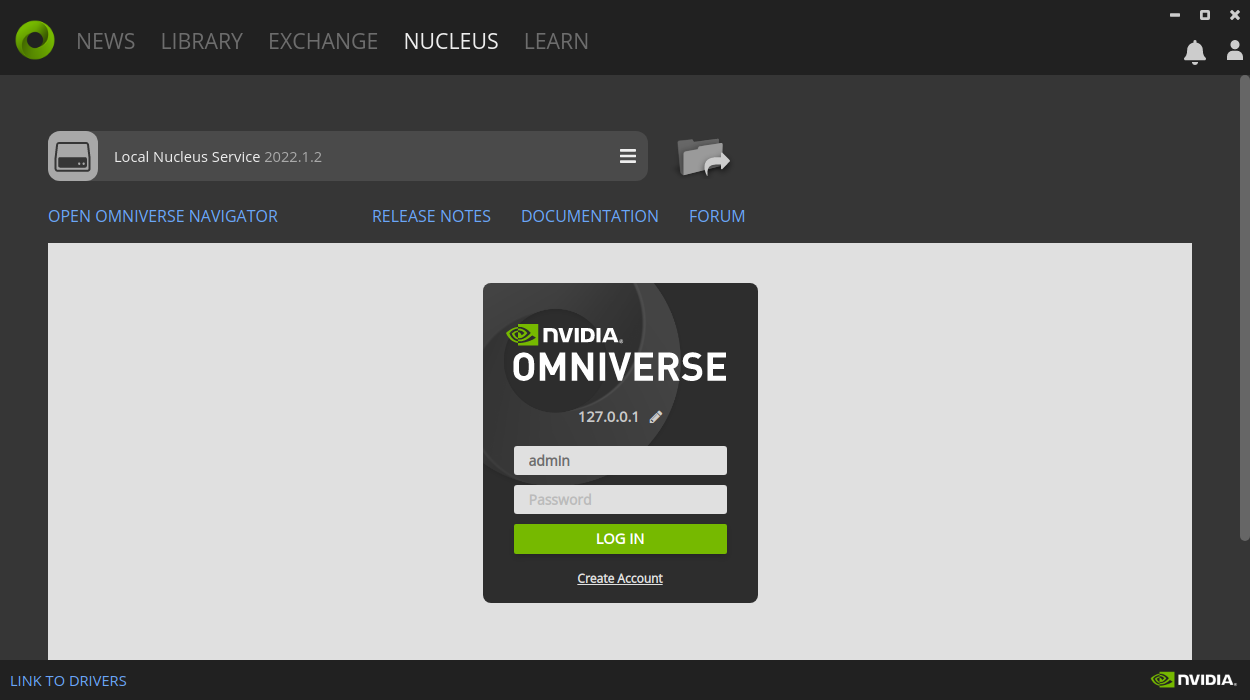
Otherwise you can follow the image below to make your nanosaur user:
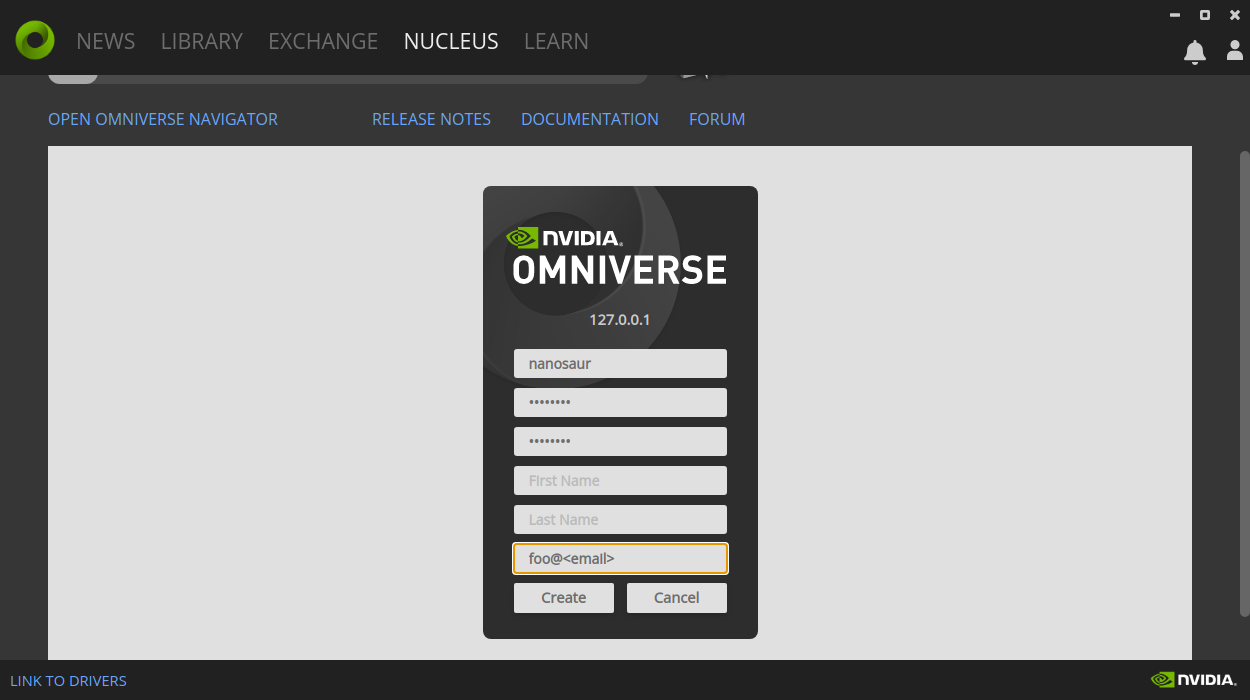
- User: nanosaur
- Password: Chose your best password
- email: your email
Run simulation
There are three simulations available for nanosaur:
- Gazebo
- Ignition Gazebo
- NVIDIA Isaac SIM
For each simulation there are different ways to switch on nanosaur
nanosaur on Gazebo is pretty simple, you need only to set up the script or follow the tutorials:
nanosaur simulation set
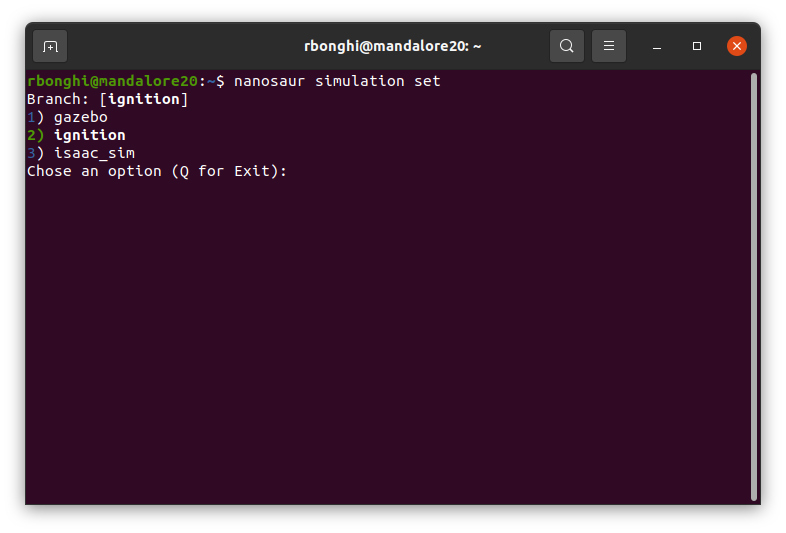
After that you can run the simulator only with:
nanosaur simulation run
Otherwise watch the tutorials: