Run nanosaur on Gazebo
Do you want to try nanosaur on a simulator? You can start directly from this tutorial.
before to follow this tutorial, install nanosaur simulators!
You can run your simulator directly
nanosaur simulation set
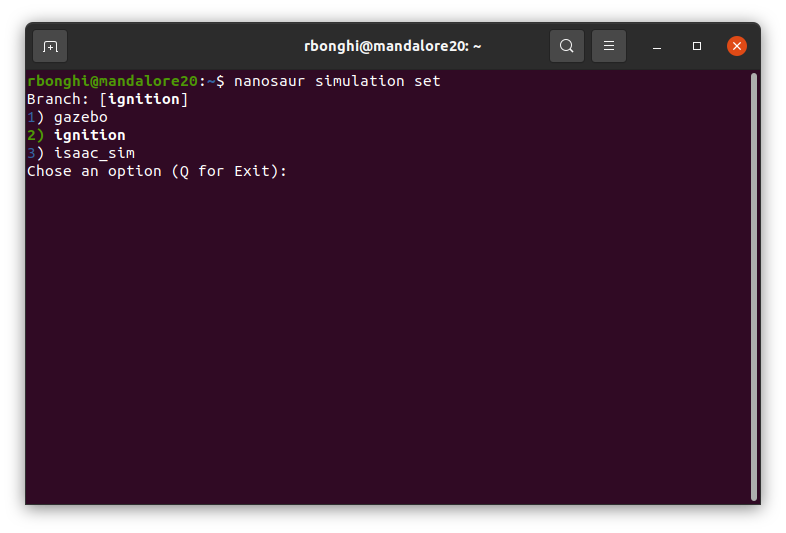
Otherwise follow below how this script works!
Run script
To run nanosaur on gazebo you need first for all load all sources
source nanosaur
When the shell is done, run the simulator using this launch file:
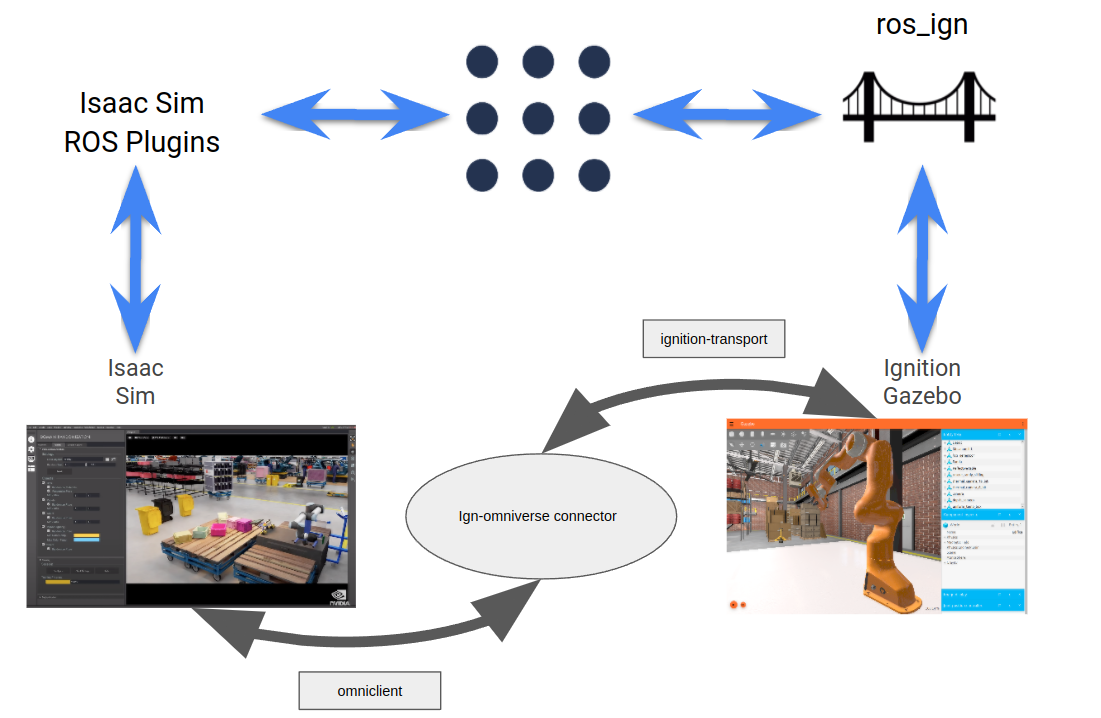
You have two simulators really simple to run: Gazebo or Ignition Gazebo
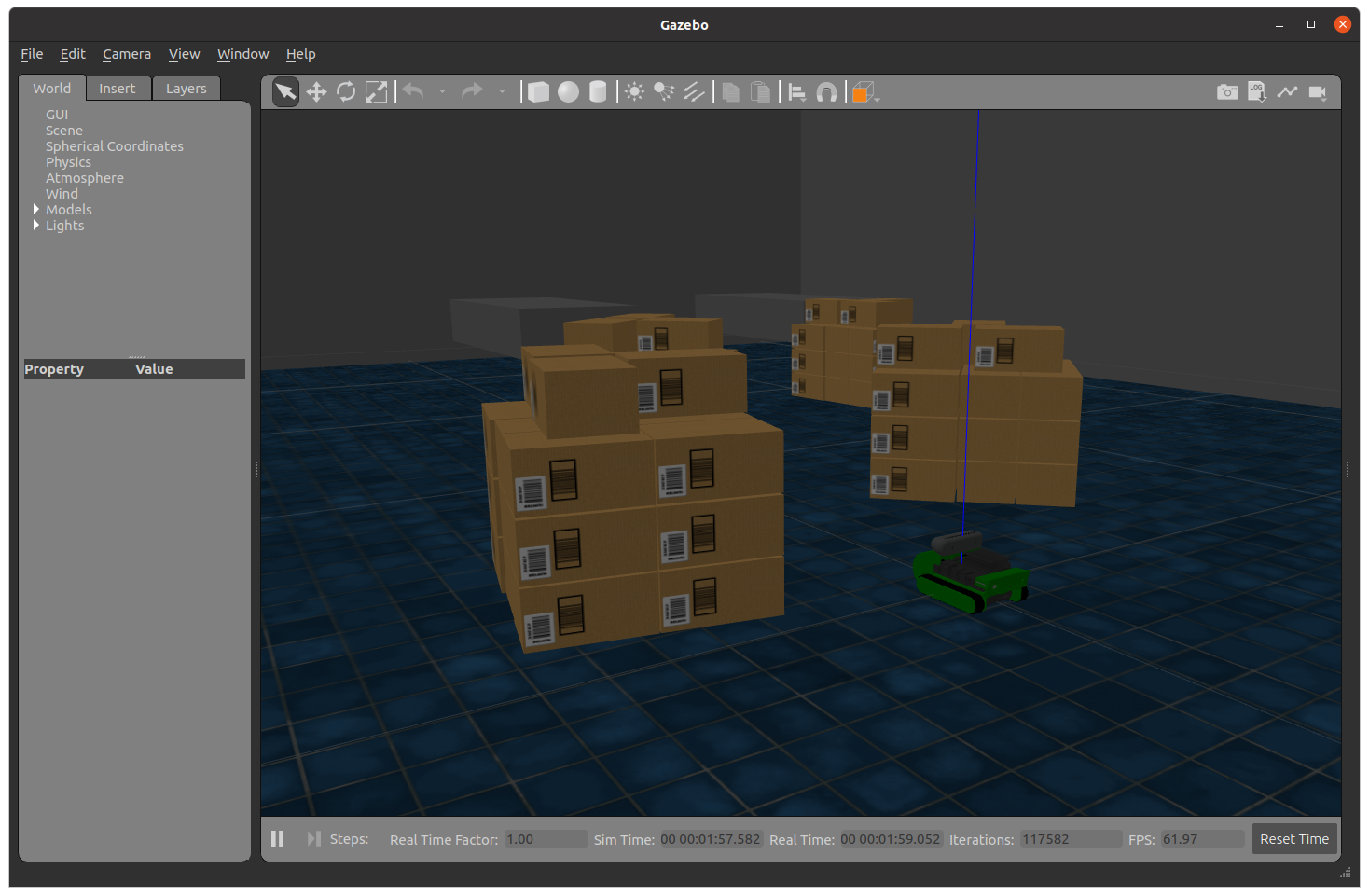
Gazebo
ros2 launch nanosaur_gazebo gazebo.launch.py
The final output on gazebo, will be like:
Change world or configuration
There are different option you to select on your simulation:
- world_name
- namespace (experimental)
All worlds available are in the nanosaur_worlds package in nanosaur_simulations repository.
Example if you want to run an empty world.
ros2 launch nanosaur_gazebo gazebo.launch.py world_name:=empty
Remember to don’t write the world extension!
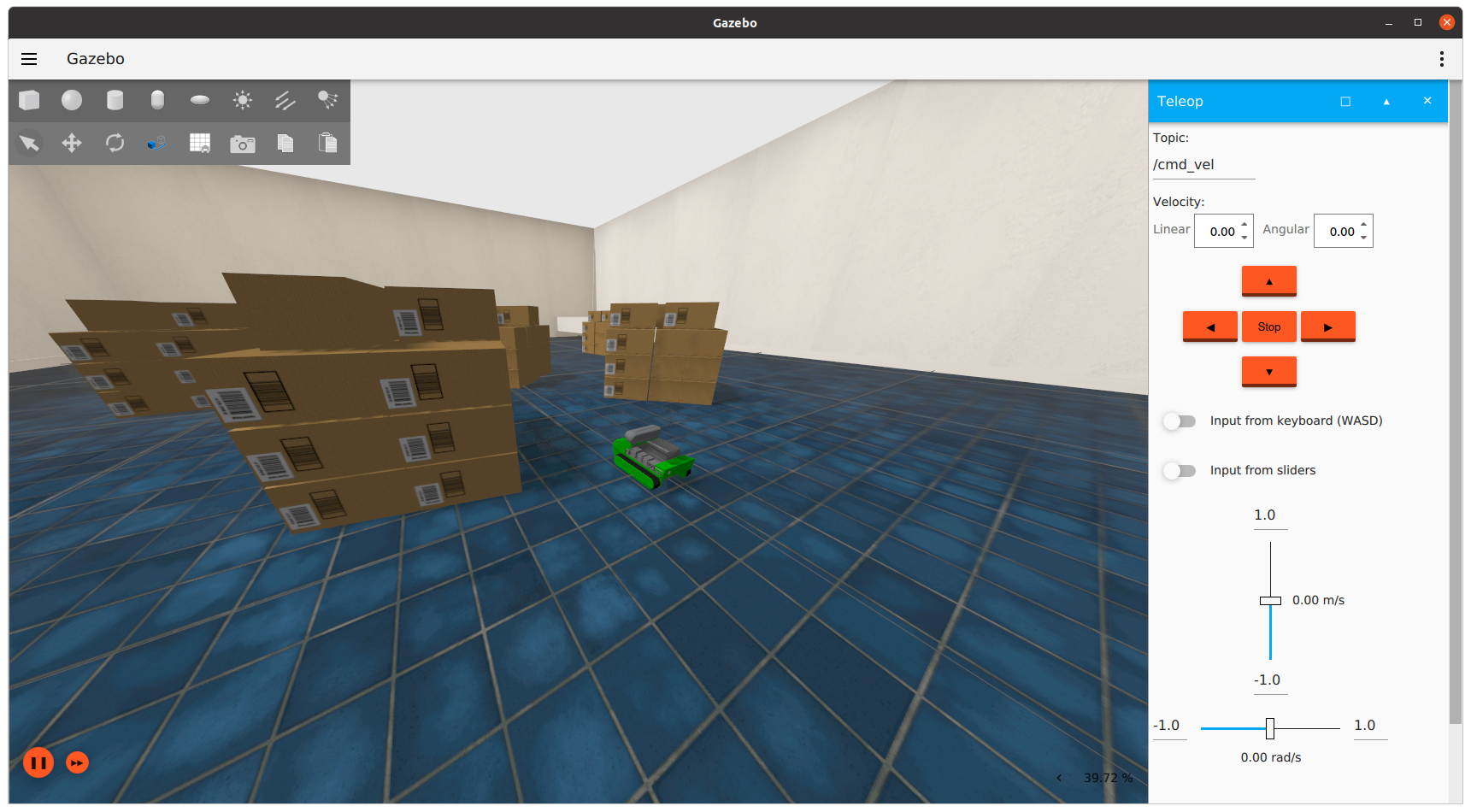
Ignition Gazebo
ros2 launch nanosaur_ignition ignition.launch.py
The final output on gazebo, will be like:
Change world or configuration
There are different option you to select on your simulation:
- world_name
- namespace (experimental)
All worlds available are in the nanosaur_worlds package in nanosaur_simulations repository.
Example if you want to run an empty world.
ros2 launch nanosaur_ignition ignition.launch.py world_name:=empty
Remember to don’t write the world extension!
Run perception
If you want to enable the nanosaur perception run this command in a new shell
nanosaur perception