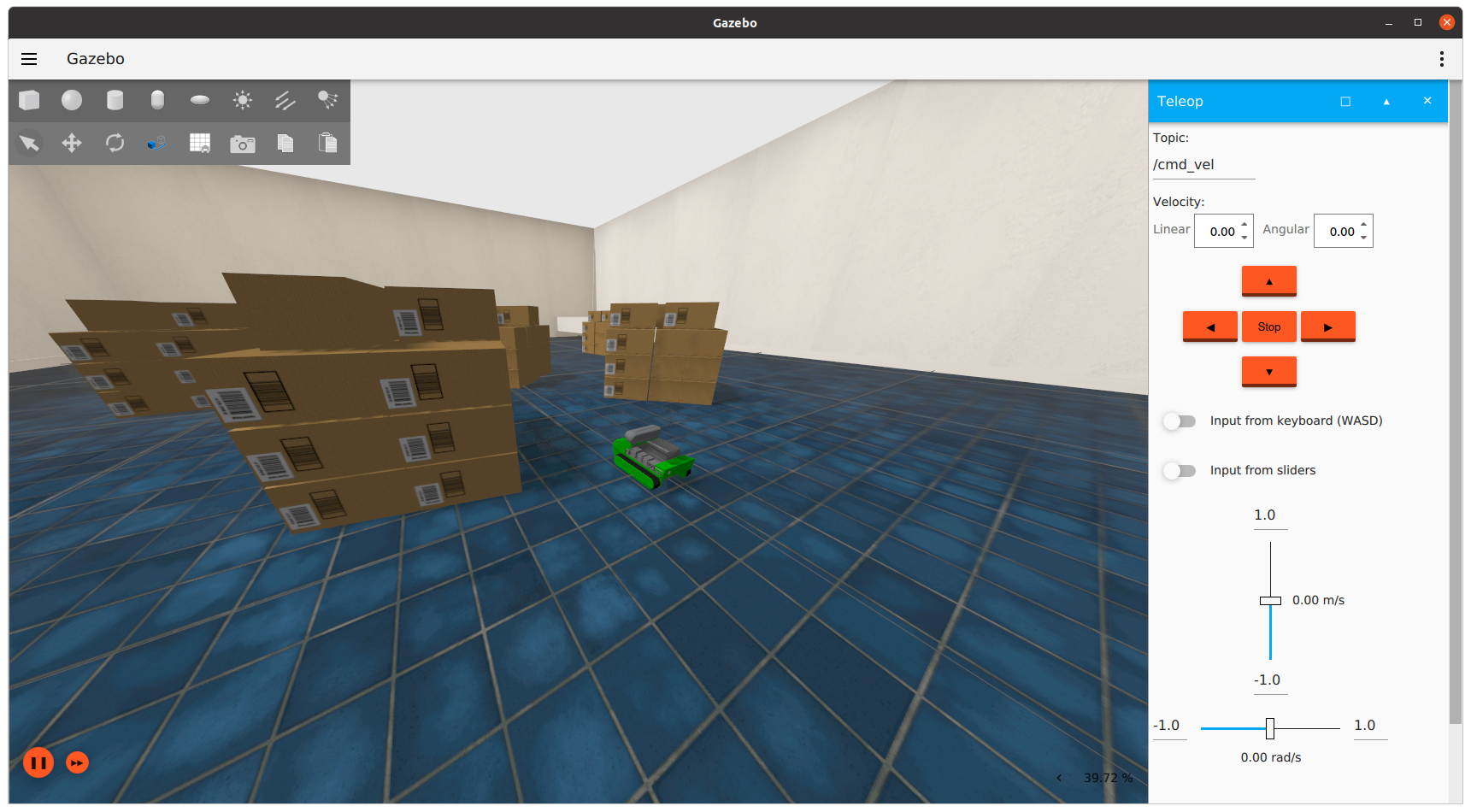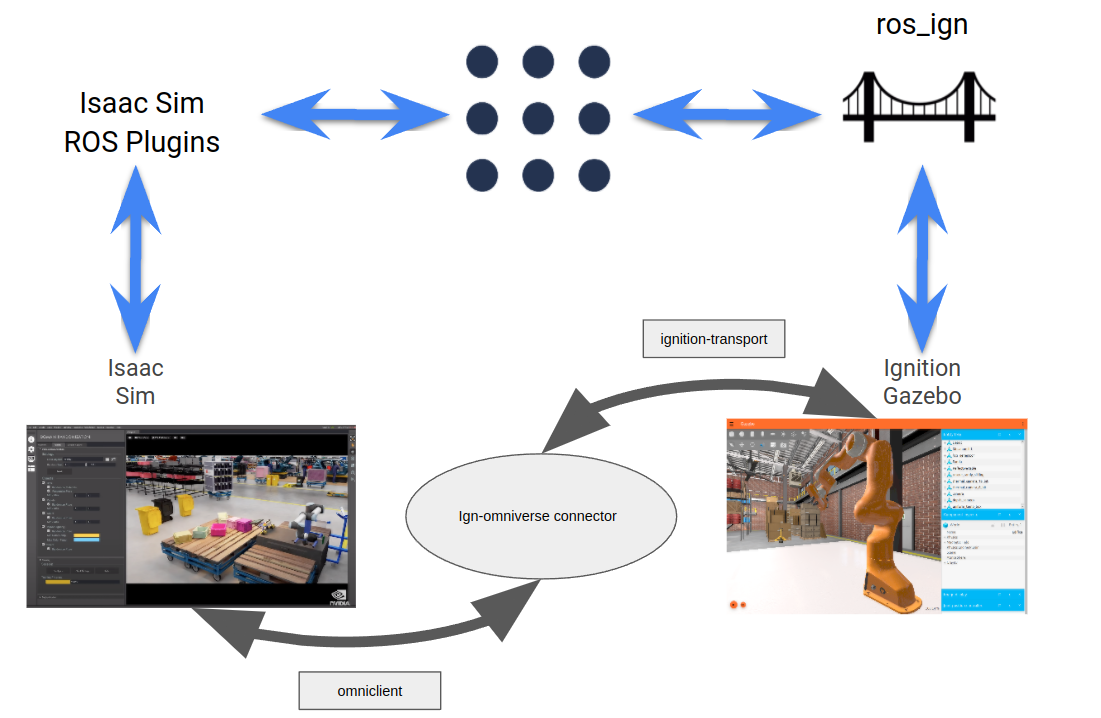
Run nanosaur with gz-omni connector
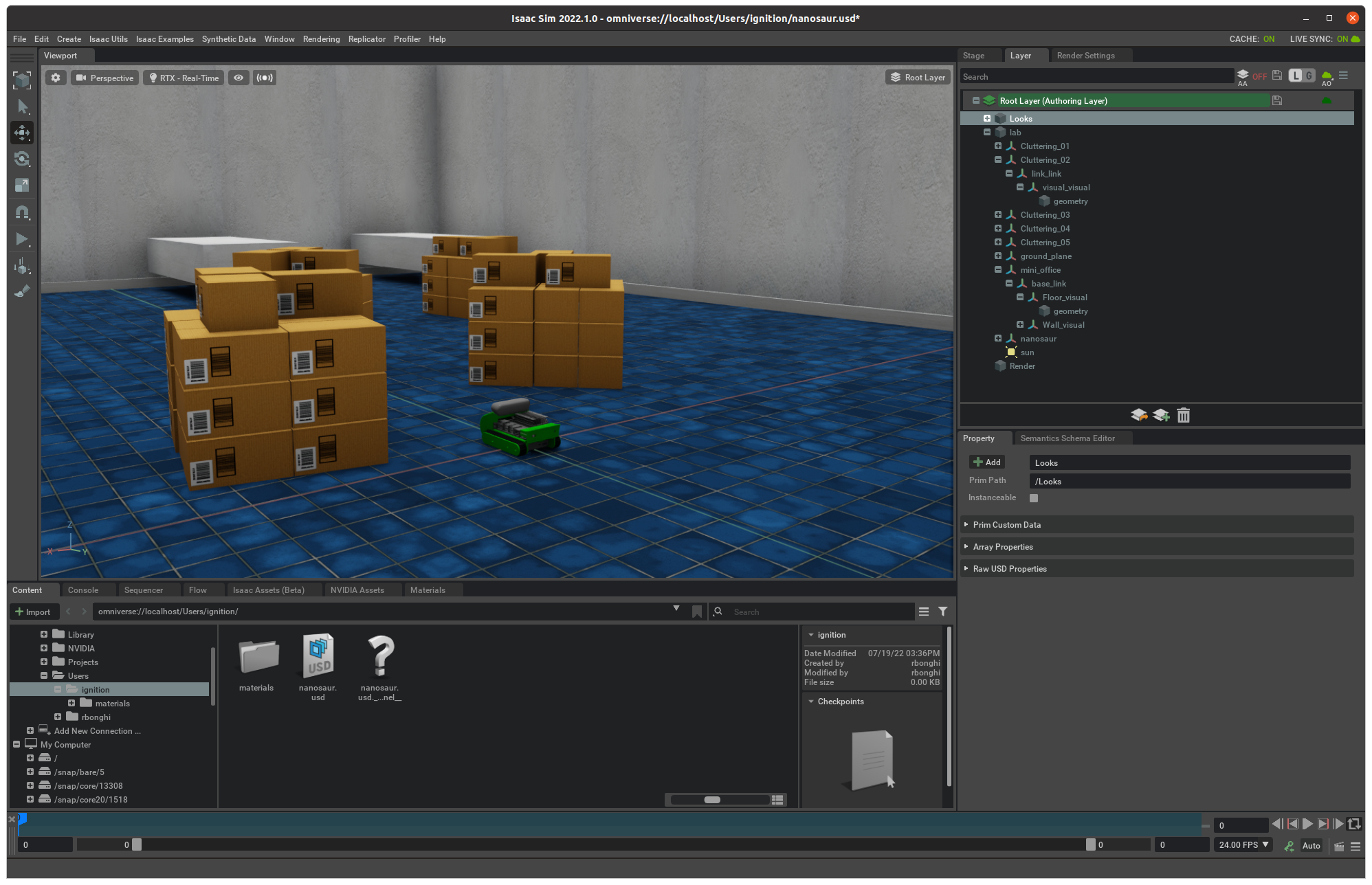
Run nanosaur use the Isaac SIM connector, to bridge Ignition Gazebo on Isaac SIM
Run nanosaur use the Isaac SIM connector, to bridge Ignition Gazebo on Isaac SIM
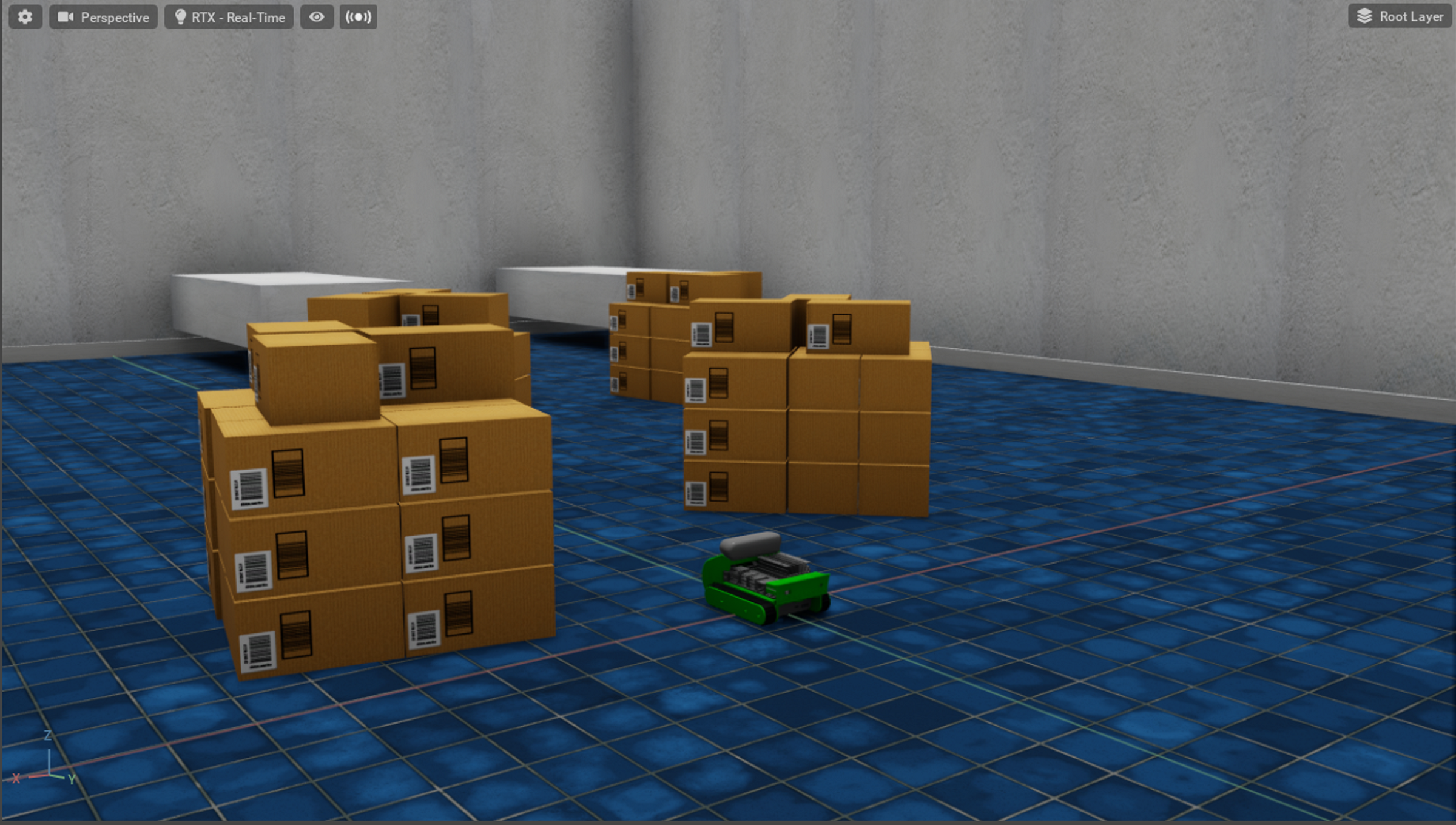
Run nanosaur in simulation using Isaac SIM
Run nanosaur in simulation using Gazebo or Ignition Gazebo
Thursday, August 4th, 2022: 8am - 9am PT Migrating ROS-Based robot simulations from Ignition Gazebo to NVIDIA Isaac SIM
ROS Developer Day 2022 (By Raffaello Bonghi, Developer Relations manager AI & Robotics - NVIDIA)
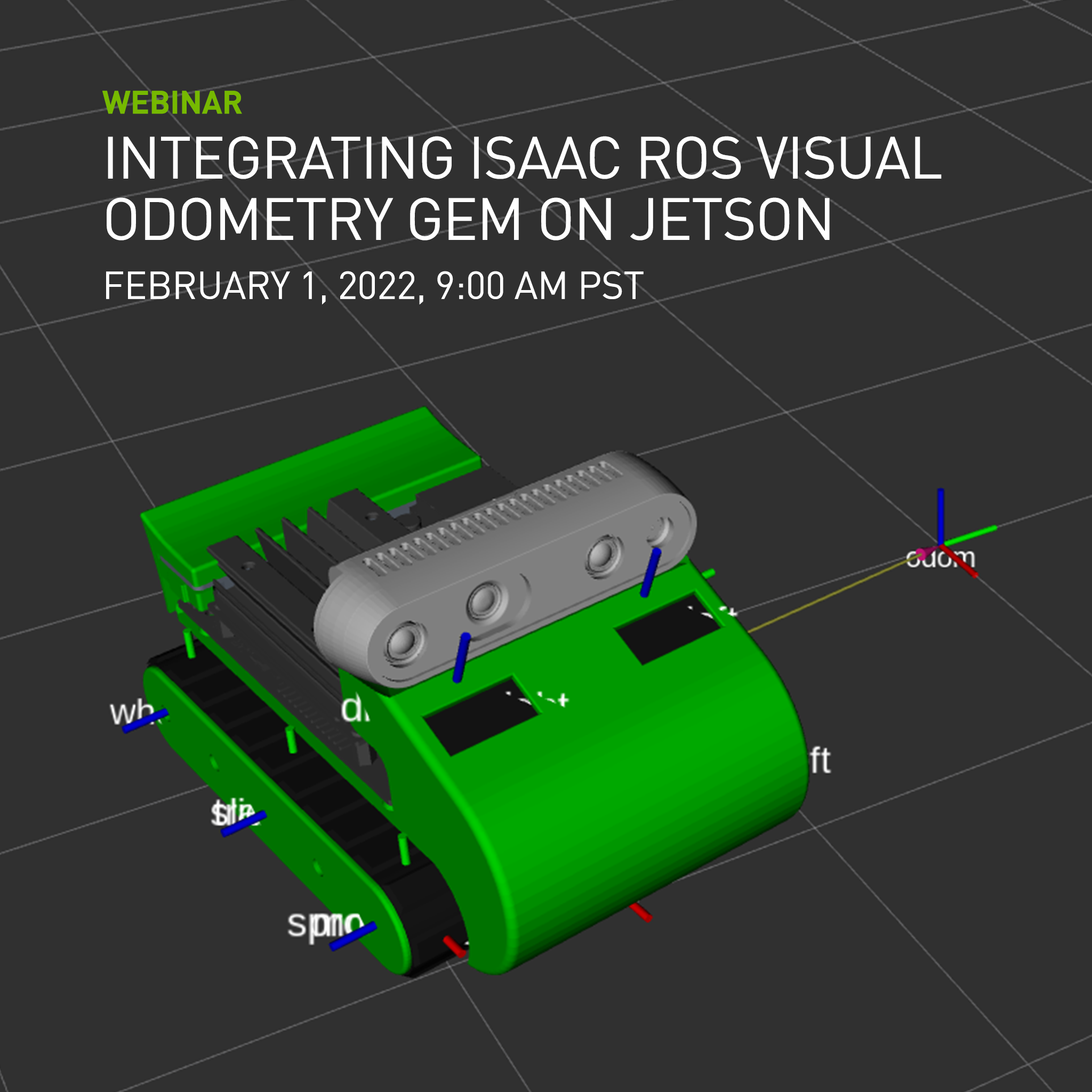
Tuesday 1st February 2022: 9am - 10am PT Integrating Isaac ROS Visual Odometry GEM on Jetson
In this youtube live we will investigate how to use nanosaur and hack to add more performance to your robot.
We will show you how to easily connect to ANY real robot from a rosject in just a few steps
We will connect to the real Nanosaur robot and we will control it using ROS 2.
Assemble, step by step, the real physical NanoSaur robot
(![]() in Italian) Come costruire un #nanosaur? Approfondimento su questo semplice robot
in Italian) Come costruire un #nanosaur? Approfondimento su questo semplice robot
In this Live Class, we will use the nanosaur simulation to program with ROS 2 Galactic.
In this Live Class, we will use the nanosaur simulation to program with ROS 2 Galactic.
How to use AprilTags detection on nanosaur. Post from NVIDIA Developer blog.