nanosaur is not a simple robot, but is designed like a real industrial robot, with a year develop roadmap, a develop workflow and a technical tagging release version.
Roadmap
For rhe nanosaur roadmap 2022, will be defined and make stable all code for Isaac ROS, make a new nanosaur-shield to be able to use an NVIDIA Jetson Xavier NX and finally enable all simulator Gazebo and Isaac SIM
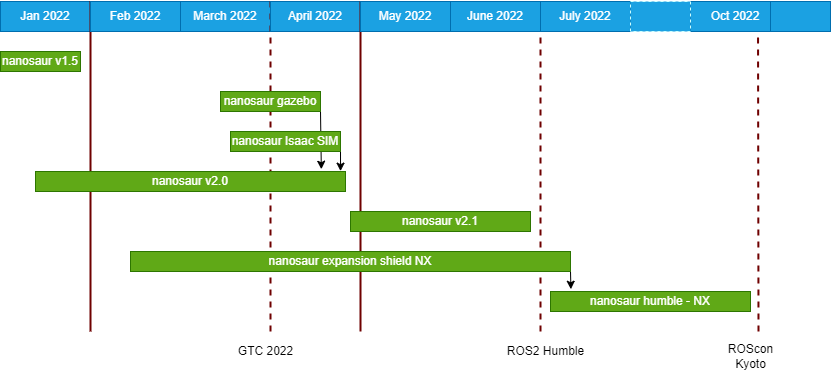
For more technical detail and which featuer or issues are fixing, take look the nanosaur project
Workflow
This project follow an extended version of gitflow where:
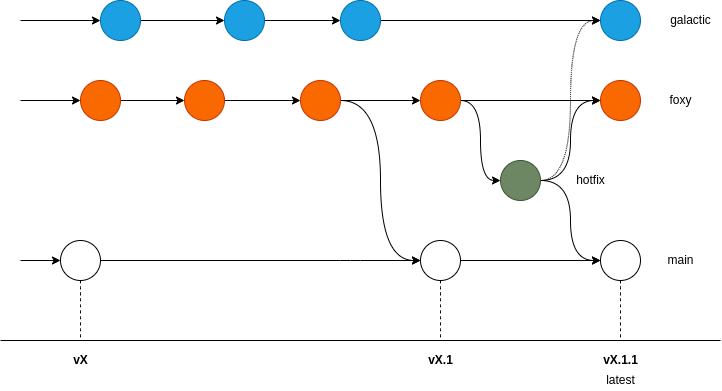
- main branch record only stable release from the stable ros foxy branch
- ROS 2 branches record progress for specific ROS 2 repository (usually these branches are unstable)
Tagging
nanosaur follow a code release tagging
…
![]() This part will be updated soon.
This part will be updated soon.
For any issue join on Discord