nanosaur is made with the same capabilities of a real industrial AMR robot. The main architecture is splitted in different parts.
Architecture
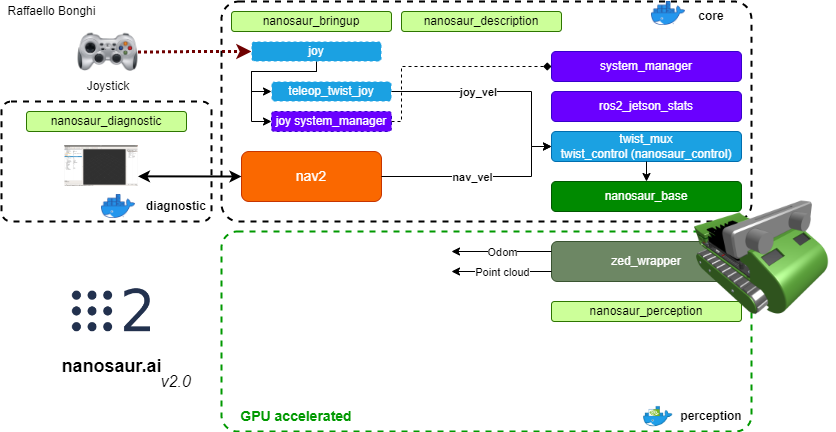
The logic to drive and control this robot is the same of a control loop system. Where the driver and the mechanical parts are located on the left of the image below.
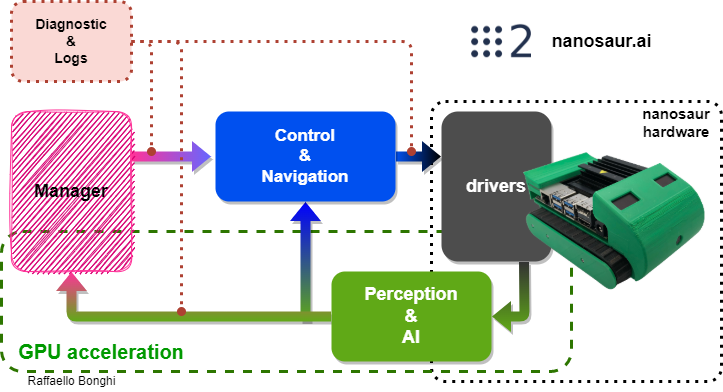
All perception is GPU accelerated to recognize and detect where nanosaur is moving and localize it in the world. This green block have different estimators for location, using the dead recognition from the cameras and motors (soon), mapping the environment and detection, object on the environment.
The blue block is all the control and navigation nanosaur system. The path planner is part of this block and same the object avoidance. To be enabled this block, read the input coming from the perception block and generate an output to drive the two nanosaur tracks.
The high level control (will be designed soon) is a supervision manager to make a task for a robot, example drive a robot to pick up something or move objects in a world. This Block take in inputs from the perception block and drive the control block.
A real nanosaur is a combination of all these blocks, in the parts below, the real architecture for each sensor used. All blocks are splitted in different docker containers, where the perception is always GPU accelerated and run on your robot.
There are mainly three types architectures, different for the camera in use, where the perception block change:
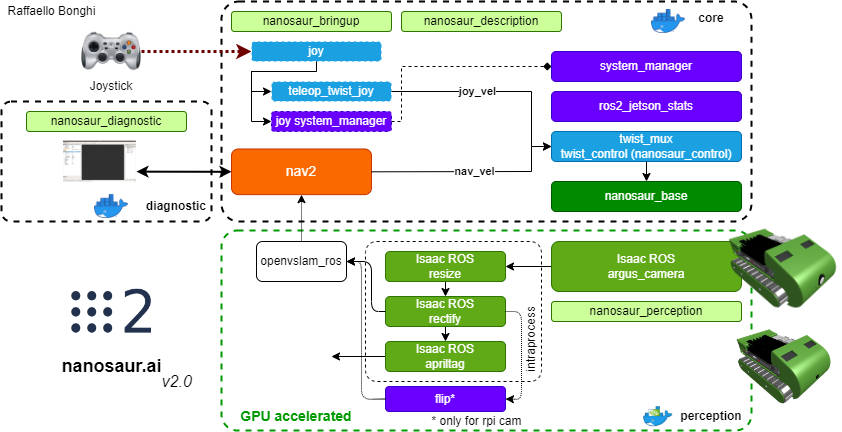
Monocular camera
If you are building a nanosaur with a monocular camera, such a raspberry Pi camera or a fisheye camera, the architecture and all ROS 2 node are like the image below.
-
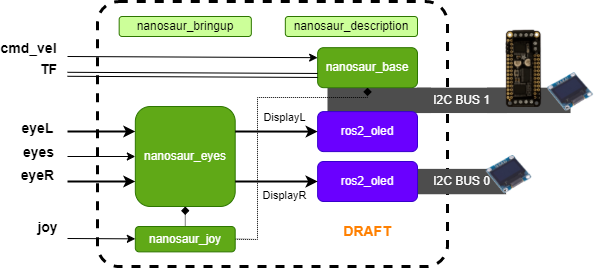
The core block is a set of package to control with path planners and low level controller the two motors of nanosaur. In this block there is also a joystick control and a board manager, with a twist_mux you are able to drive manually the robot with your joystick and in the same time enable the autonomous drive.
-
The diagnostic block, is a web-interface to know realtime the status and set high level control to the robot. This block is also replicable on your desktop and you can use rviz2 to read all status coming from the robot.
-
The perception block read the stream of the monocular camera and with a set of Isaac ROS packages convert, resize and align the image to be used from the monocular localization. On the same block there is the apriltag detection.
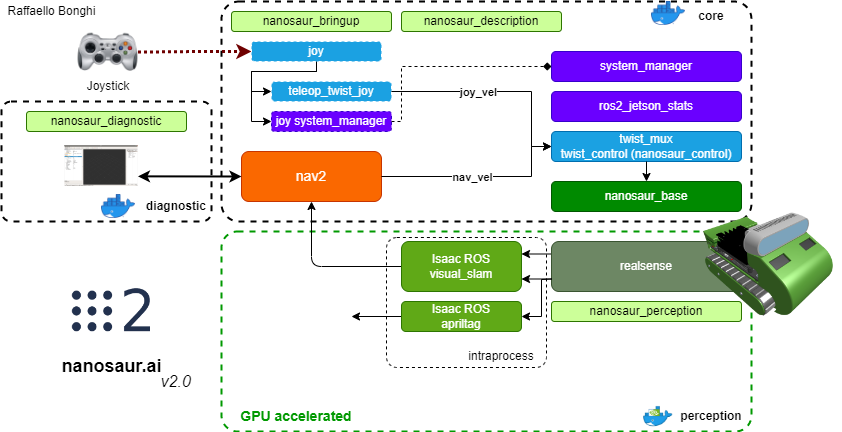
Realsense
-
The core block is a set of package to control with path planners and low level controller the two motors of nanosaur. In this block there is also a joystick control and a board manager, with a twist_mux you are able to drive manually the robot with your joystick and in the same time enable the autonomous drive.
-
The diagnostic block, is a web-interface to know realtime the status and set high level control to the robot. This block is also replicable on your desktop and you can use rviz2 to read all status coming from the robot.
-
The perception block differently from a monocular camera, use the Isaac ROS visual slam to localize the robot in the environment and generate an output instantaneously available for the navigation block.
ZEDmini
-
The core block is a set of package to control with path planners and low level controller the two motors of nanosaur. In this block there is also a joystick control and a board manager, with a twist_mux you are able to drive manually the robot with your joystick and in the same time enable the autonomous drive.
-
The diagnostic block, is a web-interface to know realtime the status and set high level control to the robot. This block is also replicable on your desktop and you can use rviz2 to read all status coming from the robot.
-
The perception block is GPU accelerated and use the full ZED SDK capabilities to know realtime the localization, floor plan, pointcloud coming out from the ROS 2 ZED wrapper.
Package architecture
To build each docker container, nanosaur use a combination of different repositories, where are located different ROS 2 packages:
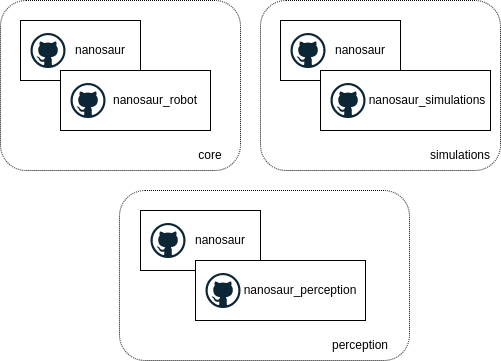
Following the picture above, there are:
core
Extra packages:
Perception
Extra packages:
Simulations (simulators on desktop)
Nanosaur robot hardware
This new architecture will be released in the new nanosaur software v2.1
This picture can change!