Nanosaur visualization
What is going on my robot? Watching the robot moving autonomously is not enough and debugging from a User Interface can be the right solution to see what is going on the robot.
How to do that?
nanosaur robot rviz
![]() Note If your device has a valid version of ROS installed, you can choice to run instead in a docker, directly on your host. A question will appear everytime you type the command.
Note If your device has a valid version of ROS installed, you can choice to run instead in a docker, directly on your host. A question will appear everytime you type the command.
The terminal will show something like the picture below:
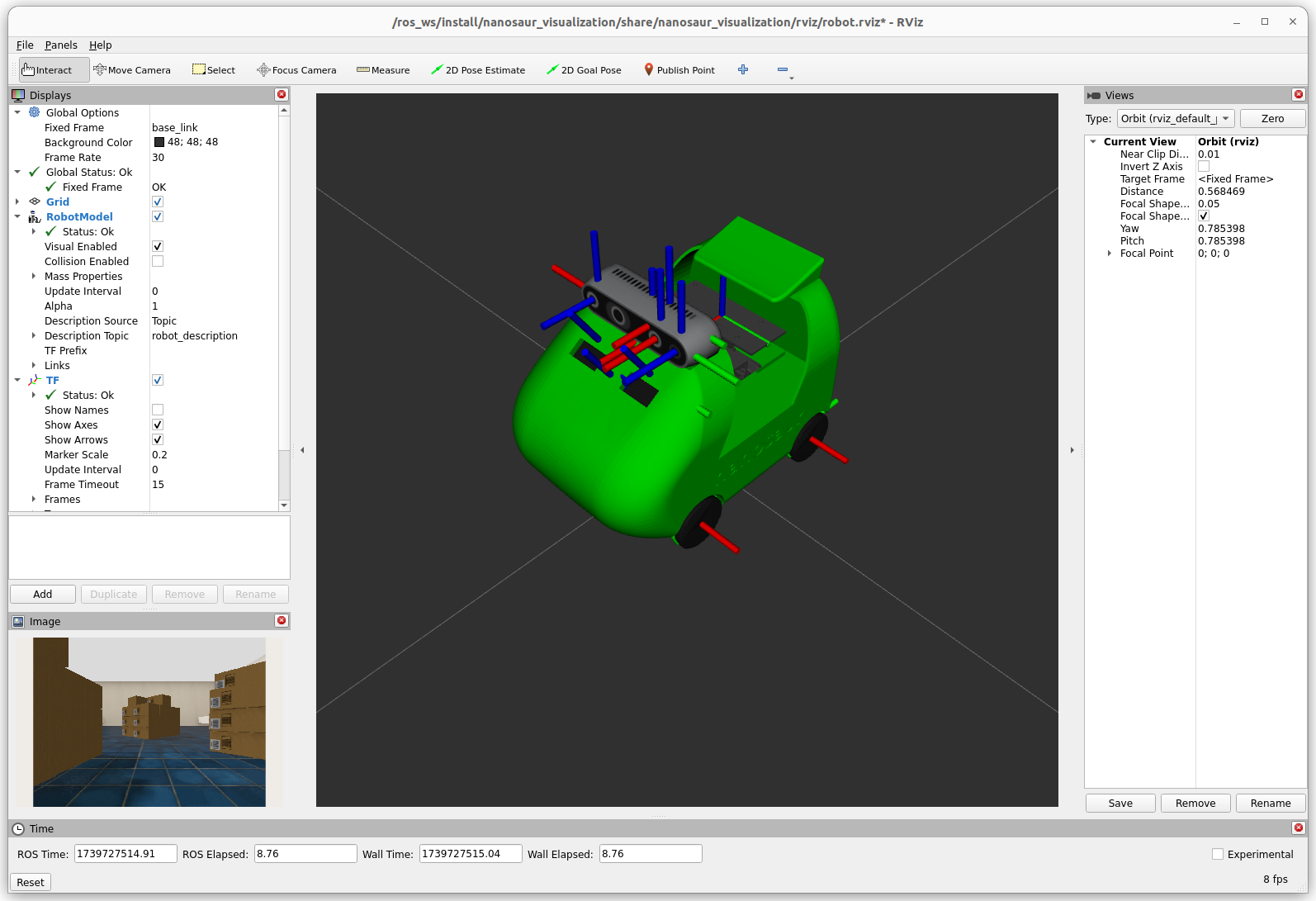
What is RViz in ROS 2?
RViz (ROS Visualization) is a powerful 3D visualization tool for ROS (Robot Operating System). It allows you to visualize sensor data, robot models, navigation maps, and more.
What you can do?
- Visualize sensor data (e.g., LiDAR, depth cameras, IMU).
- Display the nanosaur model.
- Show real-time transforms (TF frames).
- Overlay navigation maps and planned paths.
- Debug robot movement and localization.
- Use interactive markers to control the robot.