Nanosaur terminal
When the work becoming hard, it’s time to directly access to a terminal to the robot! This command will always give you the access to control nanosaur even if anything is installed on your computer!
How to do it?
nanosaur robot terminal
The terminal will show something like the picture below:
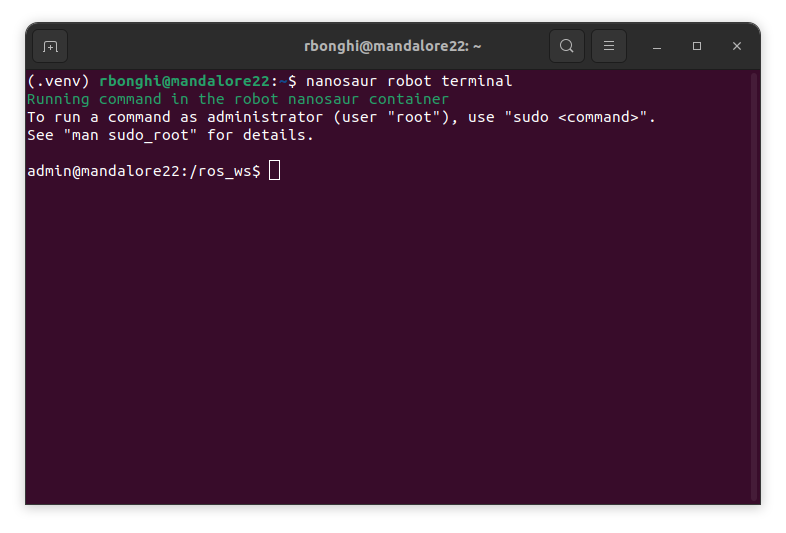
From this prompt you have full access to a terminal with ROS 2 installed and a full diagnostic access to the robot.
Example usage
Example you can read all topics running on your robot or open the rqt_graph to know if all node are well connected and running on your robot.
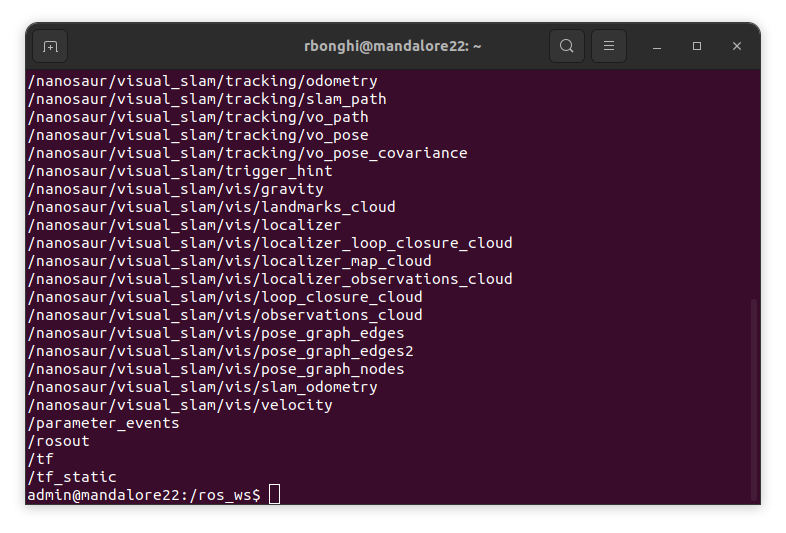
Topic lists
ros2 topic list lists all active topics in your ROS 2 system. Topics are the communication channels through which ROS nodes exchange messages.
ros2 topic list
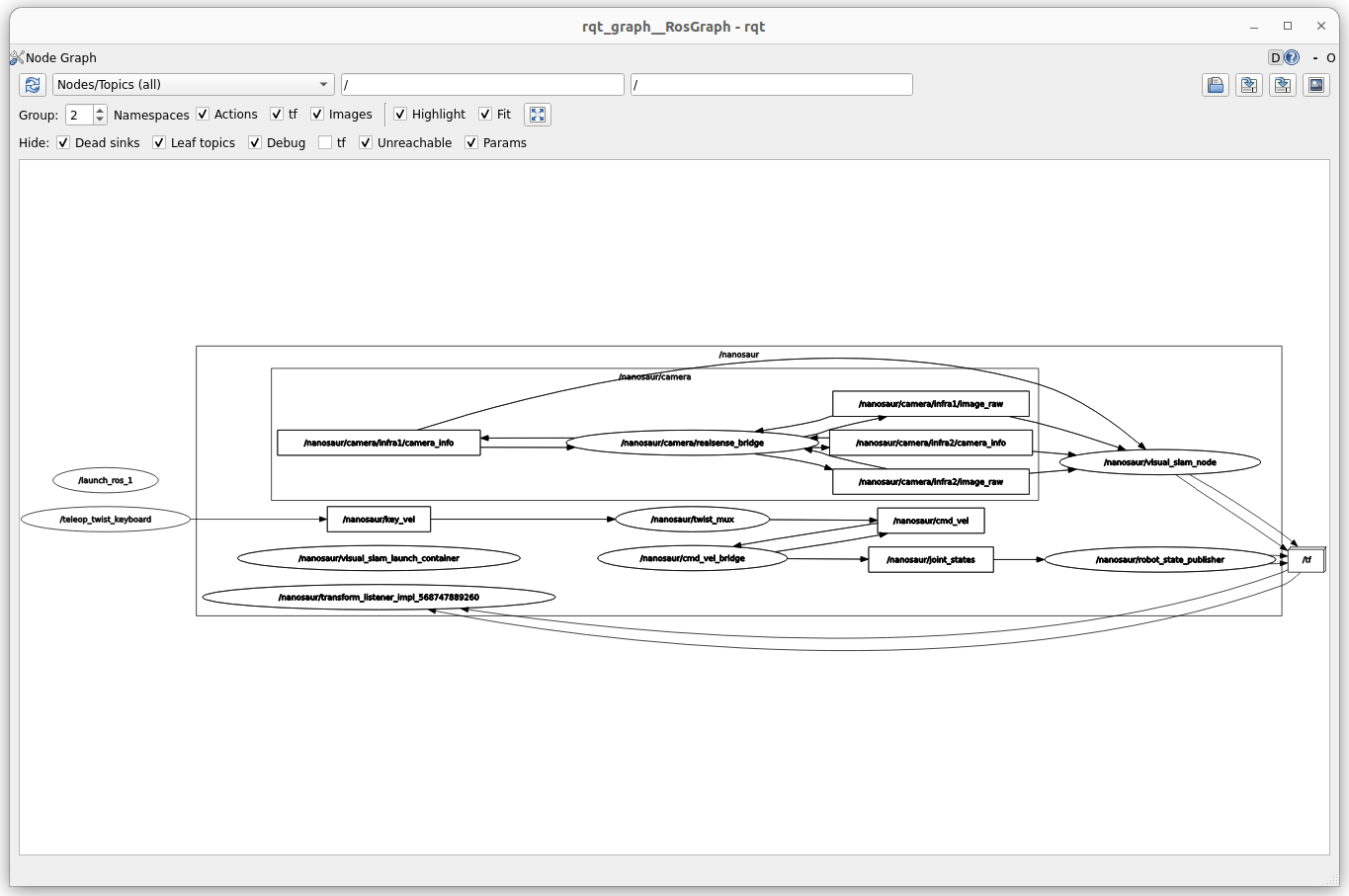
rqt_graph
launches a graphical tool that visualizes the ROS 2 computation graph, showing nodes and the topics they communicate through.
What Does rqt_graph Show?
- Nodes (ROS 2 processes)
- Topics (communication channels between nodes)
- Publishers & Subscribers (who is sending and receiving data)
rqt_graph