Keyboard drive
Not always you want an autonomous robot, sometimes you need to drive the robot or control before something dangerous is happening.
How to run a keyboard control?
nanosaur robot drive
![]() Note If your device has a valid version of ROS installed, you can choice to run instead in a docker, directly on your host. A question will appear everytime you type the command.
Note If your device has a valid version of ROS installed, you can choice to run instead in a docker, directly on your host. A question will appear everytime you type the command.
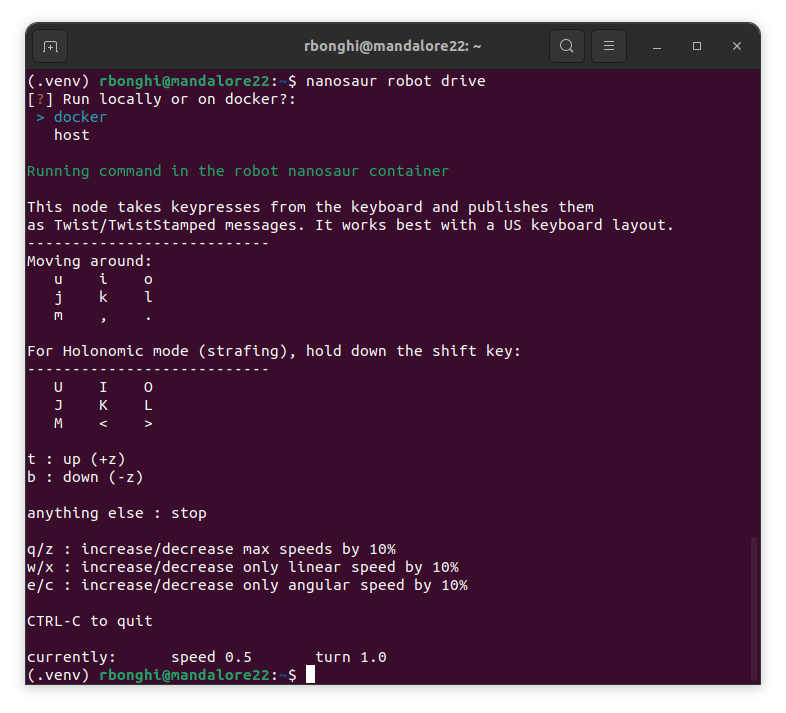
The terminal will show something like the picture below:
What does it do?
This command launches the teleop_twist_keyboard node, which allows you to control a robot using keyboard inputs. It publishes geometry_msgs/Twist messages on the nanosaur/key_vel topic.
How to use it?
After running the command, you’ll see an interface with instructions showing which keys to press to move the robot forward, backward, turn left, turn right, and stop. The typical controls are:
-
i→ Move forward -
,→ Move backward -
j→ Turn left -
l→ Turn right -
k→ Stop
It also supports adjusting linear and angular speed using other key bindings.